ETA-IK: Execution-Time-Aware Inverse Kinematics for Dual-Arm Systems
Yucheng Tang1,2,3, Xi Huang1, Yongzhou Zhang2, Tao Chen2, Ilshat Mamaev2,3, Björn Hein1,2
Under review for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)
Abstract
This paper presents ETA-IK, a novel Execution-Time-Aware Inverse Kinematics method tailored for dual-arm robotic systems. The primary goal is to optimize motion execution time by leveraging the redundancy of the entire system, specifically in tasks where only the relative pose of the robots is constrained, such as dual-arm scanning of unknown objects. Unlike traditional inverse kinematics methods that use surrogate metrics such as joint configuration distance, our method incorporates direct motion execution time and implicit collisions into the optimization process, thereby finding target joint configuration that enable more efficient and collision-free trajectory generation. A neural network based execution time approximator is employed to predict time-efficient joint configurations while accounting for potential collisions. Through experimental evaluation on a system composed of a UR5 and a KUKA iiwa robot, we demonstrate significant reductions in execution time. The proposed method outperforms conventional approaches, showing improved motion efficiency without sacrificing positioning accuracy. These results highlight the potential of ETA-IK to improve the performance of dual-arm systems in applications, where efficiency and safety are paramount.
Problem Statement
TODO
Method Overview
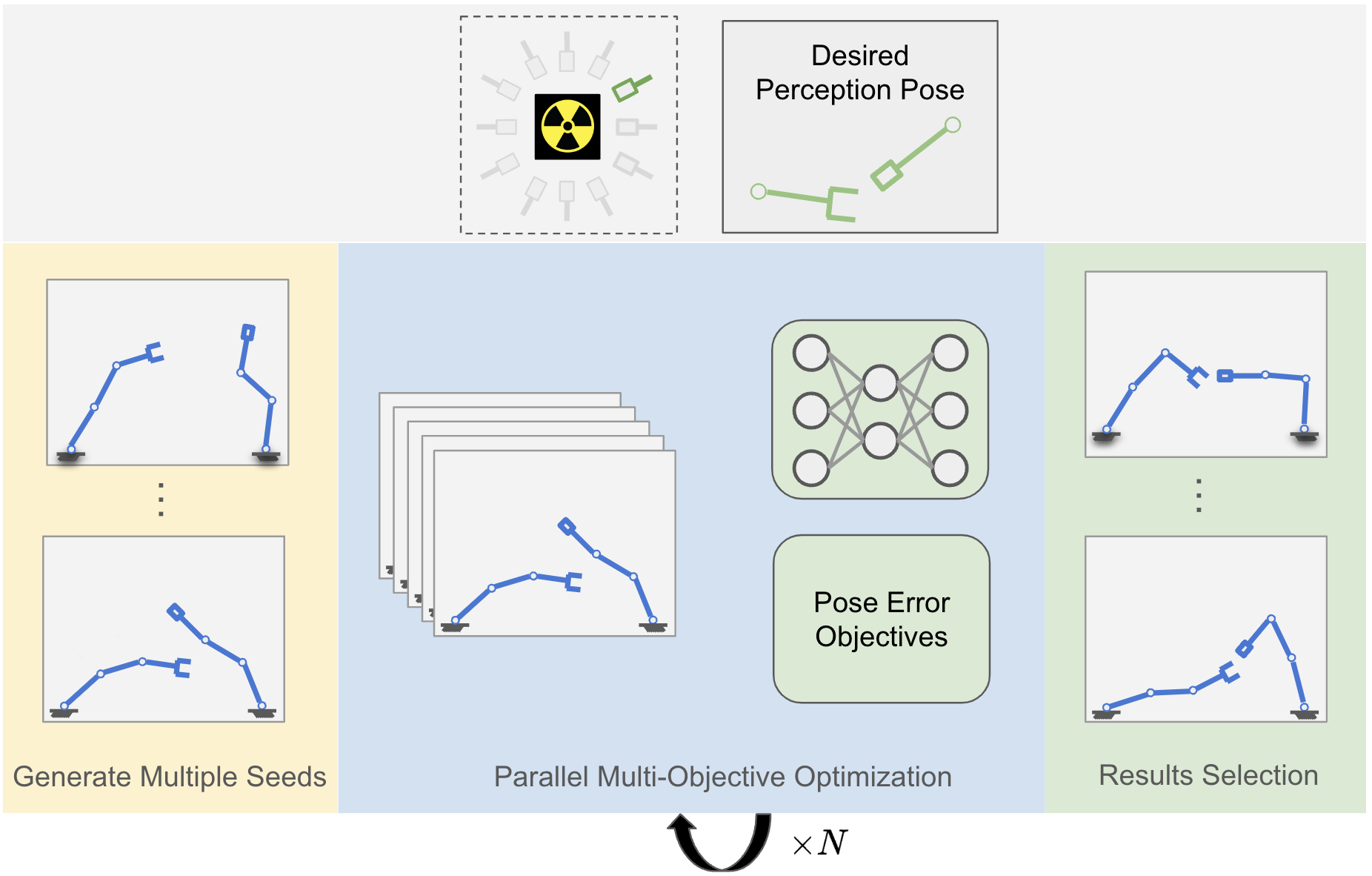
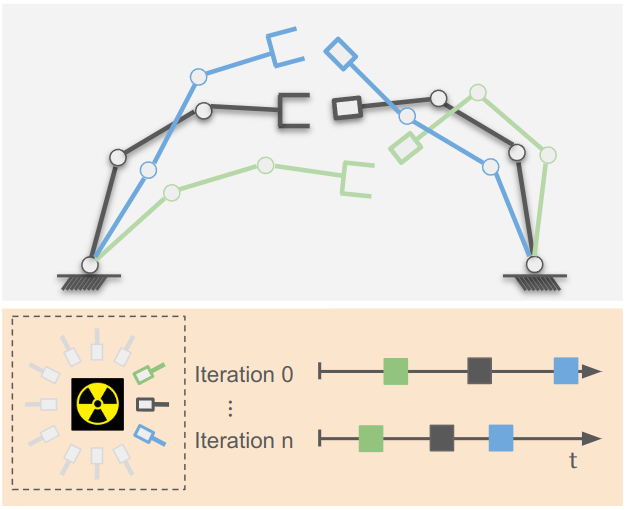
Given a desired perception pose, ETA-IK first generate a batch of initial configurations (yellow). A multilayer-perceptron time apporiximator are then integrated in a parallel optimization framework (blue). After N iterations, the results is a batch of joint configurations. The best solution is selected according to different criteria (green).
Demo Video
Cite Us
@article{tang2025etaik,
title = {ETA-IK: Execution-Time-Aware Inverse Kinematics for Dual-Arm Systems},
author = {Yucheng Tang and Xi Huang and Yongzhou Zhang and Tao Chen and Ilshat Mamaev and Björn Hein},
year = {2025},
url = {https://arxiv.org/abs/2411.14381}
}